#include <ImLib3D/ImageProcessor.hpp>
#include <ImLib3D/Display.hpp>
#include <ImLib3D/TestPatterns.hpp>
#include <ImLib3D/Filter.hpp>
#include <ImLib3D/Arithmetic.hpp>
#include <ImLib3D/ImageProgress.hpp>
#include <ImLib3D/Transformation.hpp>
#include <ImLib3D/Convolution.hxx>
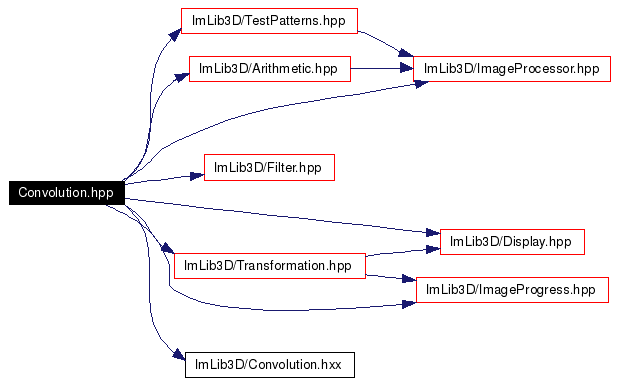
Include dependency graph for Convolution.hpp:
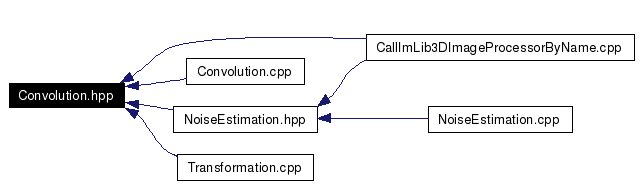
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | IP3D |
Functions | |
| template<class ImageType> | |
| void | Convolution (const ImageType &imToConvolve, const Filter &imFilter, ImageType &imResult) |
| template<class ImageType> | |
| void | SeparableConvolution (const ImageType &imToConvolve, const SeparableFilter &filter, ImageType &imResult) |
| template<class ImageType> | |
| void | ConvolutionFFT (const ImageType &imToConvolve, const Filter &imFilter, ImageType &imResult) |
| template<class ImageType> | |
| void | PartialSum (const ImageType &cumSum, const RectZone3Di &r0, typename ImageType::value_type &res) |
| template<class ImageType> | |
| void | CumulativeSum (const ImageType &src, ImageType &res0) |
| template<class ImageType> | |
| void | BoxFilter (const ImageType &src, int size, ImageType &res0) |
| template<class ImageType> | |
| void | GaussianApproxFilter (const ImageType &src, int order, int size, ImageType &res) |
| template<class ImageType> | |
| void | BorderCorrectedGaussianApproxFilter (const ImageType &src, int size, int nbFilterIter, ImageType &res) |
| template<class ImageType> | |
| void | SymmetricBinomialFilter (const ImageType &src, int order, ImageType &res) |
| void | FFTLowPassFilterApodizedIdeal (const Image3Df &src, float cutoffFreq, Image3Df &res, float rolloffFactor=0) |
| void | FFTLowPassFilterButterworth (const Image3Df &src, float cutoffFreq, float order, Image3Df &res) |
| void | FFTLowPassFilterChebyscheff (const Image3Df &src, float cutoffFreq, float order, Image3Df &res) |
<long description="">
See AUTHORS and COPYING files for more information
Definition in file Convolution.hpp.
|
||||||||||||||||||||
|
#&Convolution&# Convolution of an image by a user defined filter. The filter class is just like a float valued image, with a center point added. Ignores masks. |
|
||||||||||||||||||||
|
#&SeparableConvolution&# Convolution of an image by a user defined filter. The filter class is just like a float valued image, with a center point added. Ignores masks. Referenced by IP3D::SymmetricBinomialFilter(). |
|
||||||||||||||||||||
|
#&ConvolutionFFT&# Convolution of an image by a user defined filter using FFT. It uses multiplication in fourier domain with forward and inverse fft. This is faster than normal convolution for lmarge filter sizes. Ignores masks. UNIMPLEMENTED! |
|
||||||||||||||||||||
|
#&PartialSum&# Computes the sum of an image in a rectangular zone. It uses an image computed using CumulativeSum. This is a fast way of doing filtering with big square convolution filters. Result is the sum of all points in the rectzone: the rectzone *includes both* of its defining points. Definition at line 100 of file Convolution.hpp. Referenced by IP3D::CumulativeSum(). |
|
||||||||||||||||
|
#&CumulativeSum&# Computes an image that I(i,j,k)=Sum(0<=r<=i, 0<=s<=j , 0<=t<=k : S(r,s,t) ) This can be used by PartialSum for fast filtering. Definition at line 128 of file Convolution.hpp. References IP3D::PartialSum(), Vect3D< Value, Real >::x, Vect3D< Value, Real >::y, and Vect3D< Value, Real >::z. |
|
||||||||||||||||||||
|
#&BoxFilter&# Very fast convolution by an integer sized box signal Ignores masks. Variance of the filter is 1/12*(size*size-1). Definition at line 157 of file Convolution.hpp. Referenced by IP3D::GaussianApproxFilter(). |
|
||||||||||||||||||||||||
|
#&GaussianApproxFilter&# Fast convolution by an approximate "integer" guassian filter/ This just applies several boxfilters (boxsize=size and order times), and is only efficient for low orders. Ignores masks. If size is pair, the order must also be pair for the resulting image to lay on the same grid (else translated 0.5 voxel towards (0,0,0). Definition at line 225 of file Convolution.hpp. References IP3D::BoxFilter(), and IP3D::WrapTranslate(). Referenced by IP3D::BorderCorrectedGaussianApproxFilter(). |
|
||||||||||||||||||||||||
|
#&BorderCorrectedGaussianApproxFilter&# GaussianApproxFilter with compensation on image borders and mask borders Attenuation on border regions and border of masked regions is compensated. This is equivalent of gaussian filtering using only filter coefficients that are inside the "shape" being considered. Definition at line 253 of file Convolution.hpp. References Container3D< Im3DValue >::Fill(), IP3D::GaussianApproxFilter(), and Image3D::Mask(). |
|
||||||||||||||||||||
|
#&SymmetricBinomialFilter&# Convolution by a binomial filter/ Order should be pair to permit resulting image to be on the same grid as the original image. The filtering is quite long for high orders. This is equivalent to using the BoxFilter of size=2 of the same order, but a lot faster for high orders. A BinomialFilter approximates the Gaussian so that the variance=order/4. Definition at line 299 of file Convolution.hpp. References IP3D::SeparableConvolution(). |
|
||||||||||||||||||||
|
#&FFTLowPassFilterApodizedIdeal&# Low pass filtering using fft. Multiplies in fourrier domain by an cosine-shaped apodized rectangular window. Cutoff frequency should be between 0 and 1. Rolloff factor between 0 and 1 describes smoothness of cutoff. rolloff=0 means filter is square. |
|
||||||||||||||||||||
|
#&FFTLowPassFilterButterworth&# Low pass filtering using fft. Multiplies in fourrier domain by 1/(1+(r/r0)^2n). Cutoff frequency should be between 0 and 1. For n=inf this is an ideal lowpass filter. For n=1 this is a smooth filter. |
|
||||||||||||||||||||
|
#&FFTLowPassFilterChebyscheff&# Low pass filtering using fft. Multiplies in fourrier domain by 1/(1+(cos(n*acos(r/r0))^2)). Cutoff frequency should be between 0 and 1. For n=inf this is an ideal lowpass filter. For n=1 this is a smooth filter. |
 1.4.2
1.4.2